
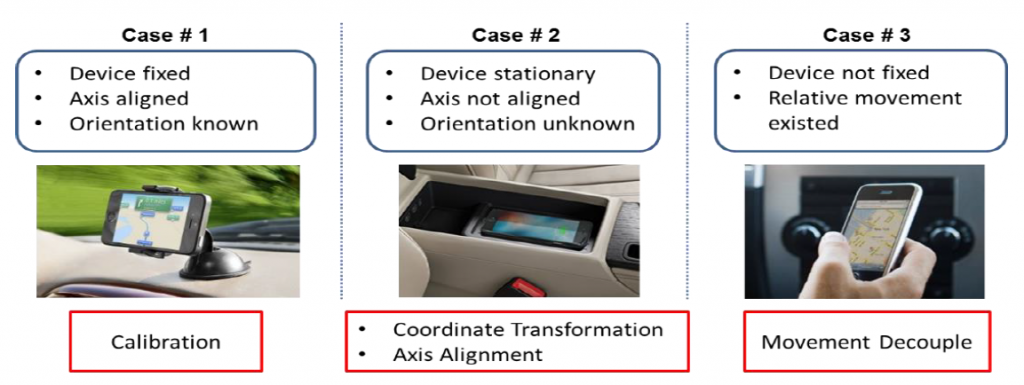
Mobile technology platforms today possess various integrated sensors, such as smartphones and tablets, which could be used as an alternative platform for estimating vehicle dynamics and recognizing driving events. However, the main challenge for implementing such vehicle/driver monitoring platforms in real world environments is the orientation and relative movement of the devices inside the vehicle. Therefore, we proposed a framework converting the smartphone-referenced IMU readings into vehicle-referenced accelerations
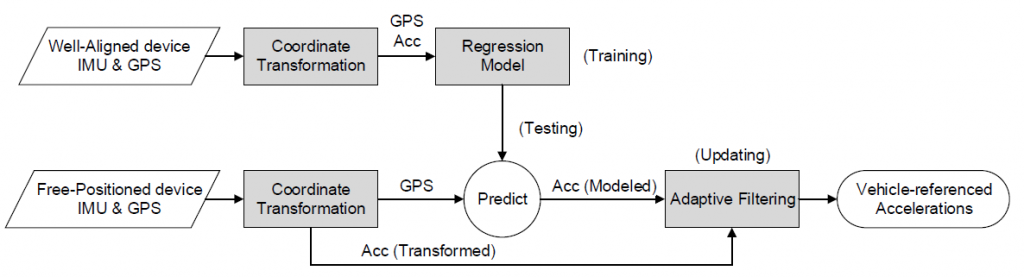
In this proposed framework, the raw smartphone IMU readings are first processed through a geometrycoordinate transformation to rotate/re-orientate the smartphone-referenced accelerations into a vehicle referenced coordinate system. Next, a regression model is established to map the relationship between IMU and GPS data, and therefore provide an adaptively filtering process to decouple the smartphone’s relative movement in the vehicle. This serves as a pre-processing module and therefore provides the basis for further applications using the smartphone data.
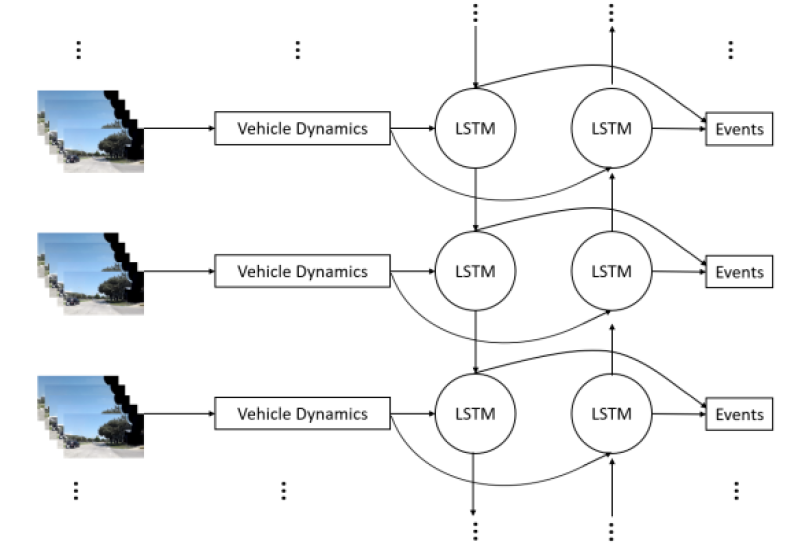
A driving event recognition task is performed to evaluate performance of our proposed method in real world environments. By taking advantage of deep learning approaches, a comparable result is observed between our proposed method and a fixed-positioned device baseline.