
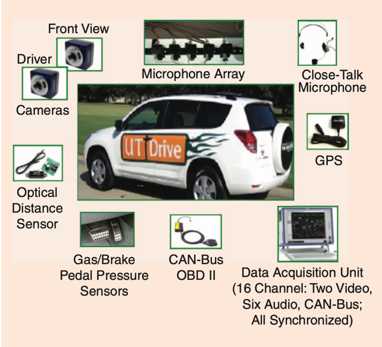
In this research, we studied driver performance under real world conditions with the help of image-based information which can be simply captured from a camera installed on the vehicle’s wind shield. Driver assessment has been done based on driver’s following distance to other vehicles and pedestrians and off-center lane rates.
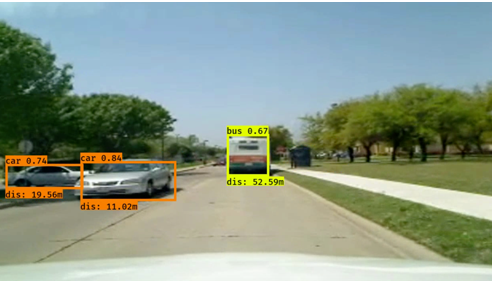
Providing a driver assessment and risk grading system helps drivers to improve their performance over the time. This system is of course subjective to have a consistent distance estimation of the following car during the time. By achieving a long-term distance pattern, we can then split the results into 3 different zones of risk. The driver assessment system can be extended later to on board vehicle heads up displays or UTDrive application features.