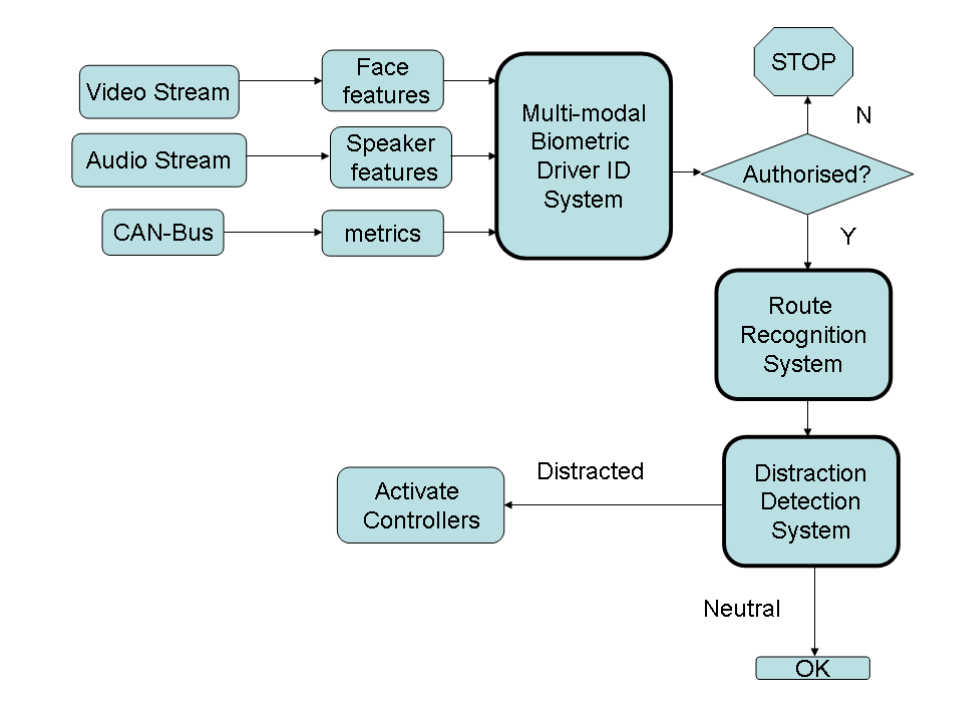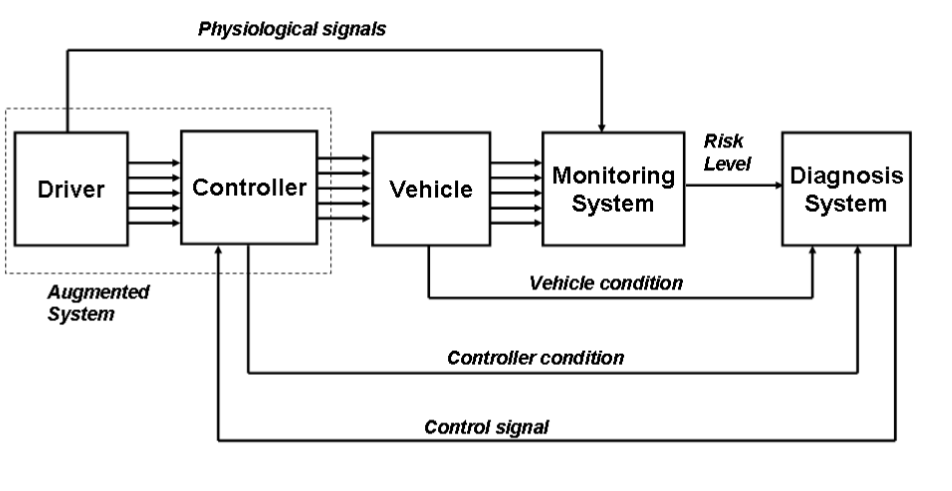
Under this sub-project the driver behaviour models are employed to design human-centric active safety systems following the block diagram above.
In other words, the vehicle control system is redesigned to be driver status-aware and context-aware. In this manner, the vehicle adapts to the driver and situation using the already designed control systems in a more efficient way.