Project Scope
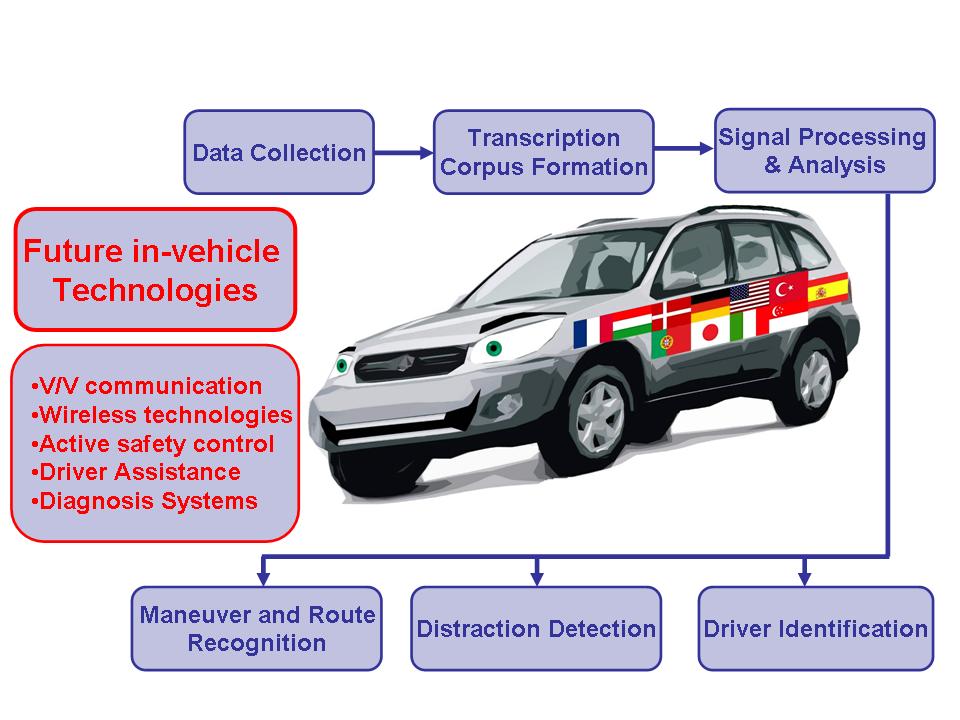
UTDrive is part of three-year NEDO-supported international collaboration between Japan, Italy, Singapore, Turkey, and USA. The UTDrive (USA) project has been designed specifically to:
- Collect rich multi-modal data recorded in a car environment (i.e., audio, video, gas/brake pedal pressures, forward distance, GPS information, and CAN-Bus information including vehicle speed, steering angle, pedal status),
- Assess the effect of speech interactive system on driver behavior,
- Formulate better algorithms to increase accuracy for in-vehicle ASR systems,
- Design dialog management which is capable of adapting itself to support a driver’s cognitive capacity,
- Develop a framework for smart inter-vehicle communications,
- Model driver behavior to develop active safety systems combined with control theory,
- Algorithm development for in-vehicle video-processing,
- Driver status monitoring system development with sensor fusion,
- Investigation of identifying new driver performance metrics.
The results of this project will help to develop a framework for building effective models of driver behavior and driver-to-machine interactions for safe driving.